
|
|
Номер команды: ТВД-005
Автоматизированный портальный кран для морских судов
Творческая категория. Тема "Проекты WeDo".
- участник всероссийского этапаКоманда: Черноморцы
Регион: Краснодарский Край
Город: Новороссийск
Название ОУ: ЧОУ "Гимназия №1"
Руководитель команды: Алешина Наталия Николаевна
Оператор №1: Дацюк Никита
Оператор №2: Купреева Екатерина
Дополнительные операторы: Липский Андрей
Дополнительная информация: Оператор №3: Липский Андрей
Зарегистрировал робота: Алешина Наталия

|
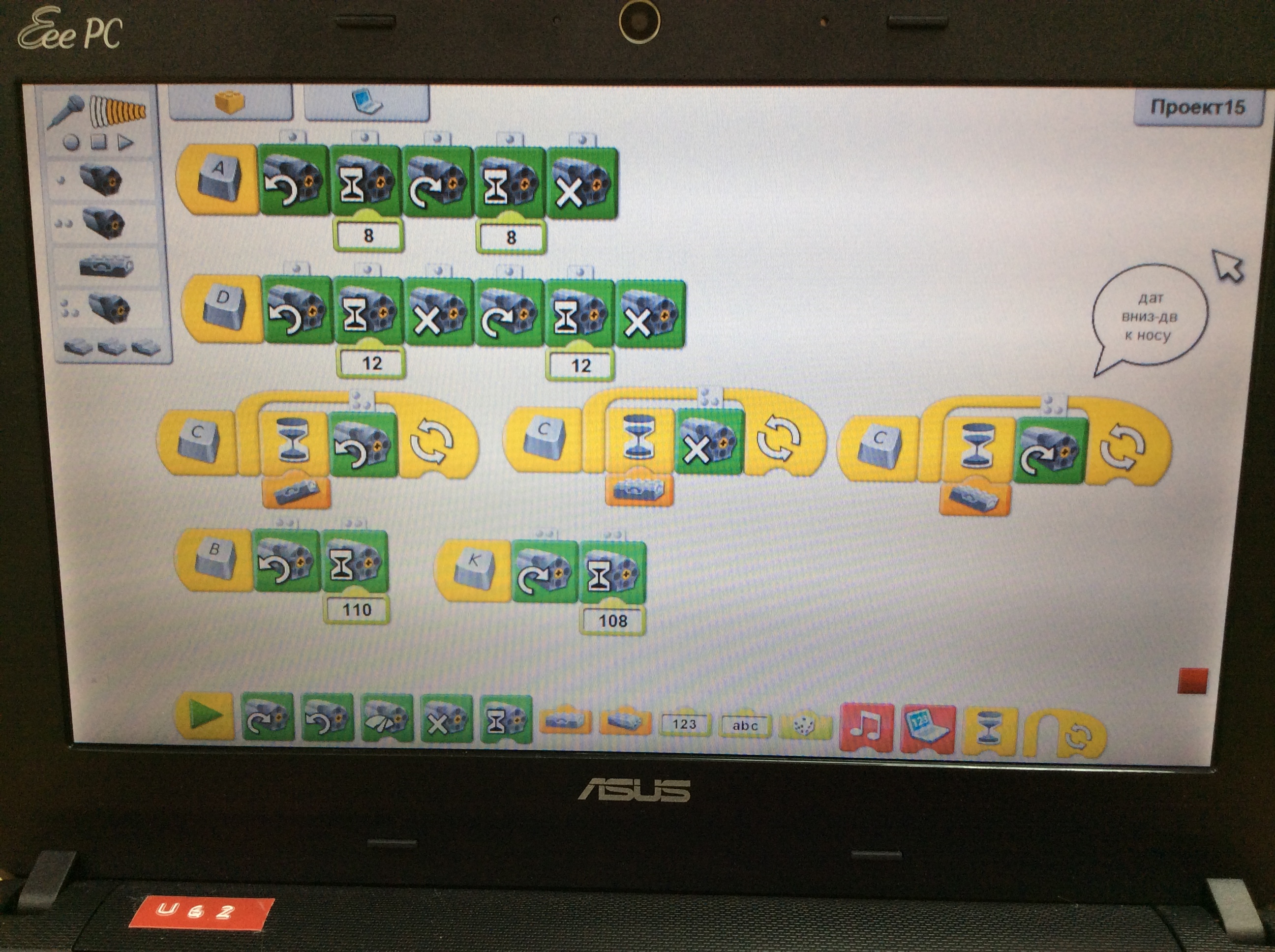
Описание:Наша идея - конструирование портального крана, который осуществляет выгрузку и погрузку контейнеров с морского судна на автомобильный транспорт из деталей конструктора LEGO WeDo.Цель: построить модель, которая поднимает груз (контейнер) и перемещает его в двух направлениях горизонтальной плоскости. Прежде, чем начать работать над проектом наша дружная команда отправилась на экскурсию в Новороссийский морской торговый порт. Порт - это одно из самых крупных предприятий города Новороссийска. Наш порт - крупнейший на Черном море и входит в десятку самых больших портов Европы. В порту нам показали как выгружают и загружают контейнеровозы. Мы узнали, что в нашем порту есть мобильные краны, именно они выполняют погрузку и выгрузку. Экскурсия подсказала нам идею создания модели портального автоматизированного крана. Принцип действия:Наша модель использует несколько электродвигателей и коммутаторов.Портальный кран установлен на четырех опорах. Движение всей модели вдоль причала осуществляется по рельсам на четырёх колесных парах засчет вращения обрезиненного колеса, которое соединено с электродвигателем осью. Запуск движения и остановка двигателя производится засчет датчика наклона, который установлен на стойке и работает как переключатель скорости электродвигателя. В верхней части модели расположена каретка на обрезиненных колесах. Для перемещения каретки в горизонтальной плоскости используется электродвигатель, который вращает малый шкив, соединенный ремнем с большим шкивом. С двух сторон конструкции на верхней панели расположены три катушки: со стороны судна одна катушка, со стороны причала две катушки. Они объединены осью с большим шкивом . На катушки наматывается трос и двигает каретку из стороны в сторону. Подъем груза осуществляется элетродвигателем, на который осью закреплена катушка с захватывающим магнитным устройством. Технические характеристики:Общая площадь проекта: 60 см * 100 смВ модели используются следующие электронные элементы: - 5 электродвигателей, - 5 коммутаторов, - 3 датчика наклона |




{kind=link}